View
Edit
History
Attach
Robotics @ UAlberta
Telerobotic and Biorobotic Systems Group
Home
Research
HapticTeleoperationControlArea
Haptic Teleoperation Control Area
Projects in Area 1: Haptic Teleoperation Control
Stability, passivity and performance of sampled-data teleoperation systems
Control of nonlinear teleoperation systems subject to disturbances
Adaptive control of nonlinear uncertain teleoperation systems
Control of pneumatically-actuated haptic teleoperation systems
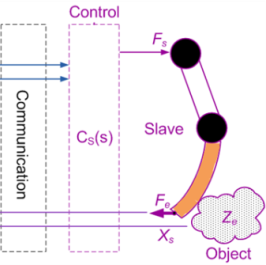
Effects of link and joint flexibility in a teleoperated robot
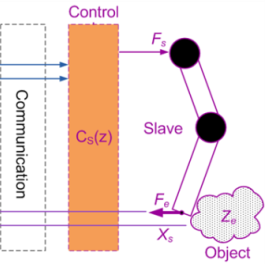
Stability of discrete-time controlled bilateral teleoperation systems
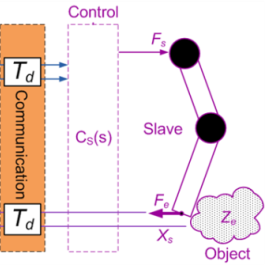
Time delay compensation in bilateral teleoperation systems
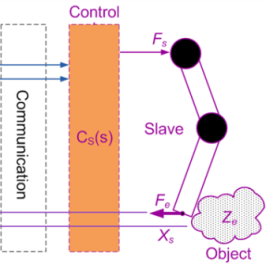
Transparency improvement via bilateral teleoperation control design
Bilateral control of teleoperation systems subject to varying time delays
Home Page
About us
News
Positions
Contact
Research
People
Publications
Videos
Funding sources
Community service
Lab tours
Robotics for COVID-19
Conferences & Journals
Media
Twitter Updates
Follow me
Edit