Transparency Improvement In Bilateral Teleoperation
Transparency improvement in bilateral teleoperation
For haptic teleoperation, user's motion commands are fed forward from the master to the slave, and environment interaction forces are fed back from the slave to the master (thus, bilateral control). Using my master-slave system, I conducted haptic teleoperation experiments involving a tissue palpation task (probing tissue for estimating its characteristics). For different teleoperation controllers (position-error based; direct force reflection; four-channel), the teleoperator performance was assessed and compared in terms of objective criteria that evaluate accurate transmission to the user of certain task-related information (this is called "teleoperation transparency"), e.g., force versus deformation characteristics of a tissue in the case of a palpation task.
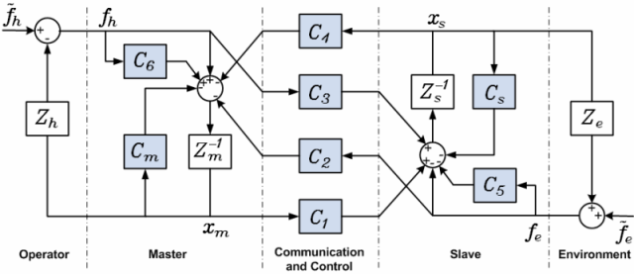
4-channel bilateral teleoperation system.

Typical torque–displacement relationships measured at the slave and as perceived by the user for a silicon-based phantom (solid) and a foam object (dotted) as the environment.
This research also involved robot modeling and friction compensation, and hand force estimation using a state observer.