Control Of Pneumatically-actuated Haptic Teleoperation Systems
Control of pneumatically-actuated haptic teleoperation systems
Researchers: Sean Hodgson, Minh-Quyen Le, Minh-Tu Pham, Mahdi Tavakoli
Summary:
Recent developments in robotics and telerobotics have allowed working in environments that are normally difficult or hazardous for the human hand to reach. Robotic applications have been developed for applications ranging from surgery to space exploration. For instance, robots may be required to work in areas that have extensive magnetic interference.
Magnetic Resonance Imaging (MRI) affords images with high resolution and contrast and allows surgeons to obtain a patients’ three-dimensional visualization. Robotic surgery in an MRI is useful because one can visualize the exact area one is working in. Robotic surgery under MRI can also guide the surgical tools to targets not normally visible. The surgeon operating on the patient is given immediate feedback while conducting the surgery. This would make the surgery more efficient because the surgeon can fix problems without delay and without the patient leaving for further diagnostic testing and follow-up.
However, MR images are obtained through the use of strong and precise magnetic field. Magnetic materials, electric motors or sensors generate electric and magnetic noises that make it difficult to scan highly precise MR images. Additionally, electric motors, sensors and other ferromagnetic materials cannot function in the presence of magnetic fields. Where it is not possible to use electric motors, it is possible to use pneumatic actuators to drive robots. However, pneumatic systems suffer from common drawbacks including friction, sensitivity of the actuator dynamics with respect to load and piston position along the cylinder stroke, etc. From a controls perspective, controlling a pneumatic actuator is a challenge because the system is non-linear. The goal of our research is to develop control laws for a robotic system that uses binary (on/off) pneumatic actuators for precise position control with minimal switching activity.
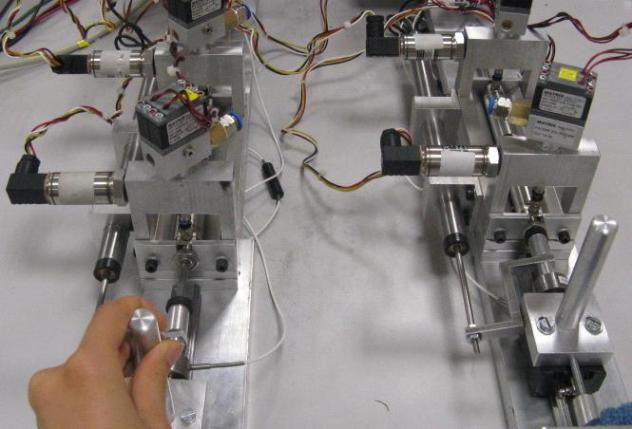
Photo courtesy Minh-Tu Pham