Time Delay Compensation In Bilateral Teleoperation
Time delay compensation in bilateral teleoperation
Researchers: Arash Aziminejad, Mahdi Tavakoli, Rajni V. Patel, Mehrdad Moallem
Related publications: 1, 2, 3, 4, 5
Summary:
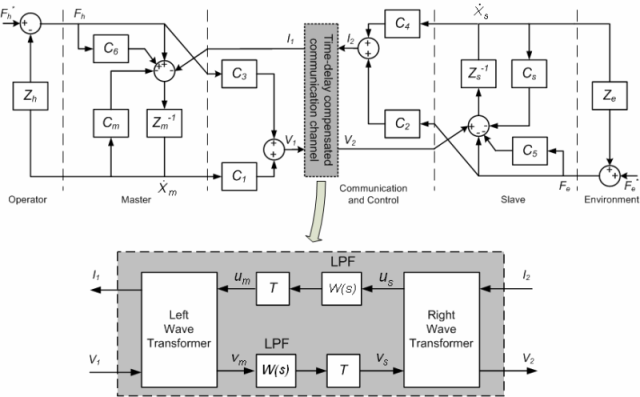
We have worked on time delay compensation in long-distance haptic teleoperation including telesurgery. The latency introduced by the communication channel reduces efficiency by requiring the user to slow down on each movement and can, in the worst case, cause instability in the teleoperation system. Moreover, time delays significantly change the “feel” or the perceived mechanical impedance of an object, which is a measure of teleoperation transparency. In this research, the scattering approach was extended and new models of a wave-based delay compensated communication channel were introduced. The research showed that using slave-side force measurements significantly improve transparency in comparison to the traditional delay compensation scheme. The research also bridged the passivity framework to the 4-channel bilateral control architecture, which has far better transparency characteristics compared to traditional architectures (position error based and direct force reflection). The proposed wave-based 4-channel teleoperation control architecture ensures ideal transparency under time delay, which is a significant advantage over the previous methods.
Before delay compensation (for 20 msec delay):
(:youtube WsAF4YkyIBA scale=1.35:)
After delay compensation (for 600 msec delay):
(:youtube OlviHvo3IiE scale=1.35:)