Effect Of Link And Joint Flexibility In A Teleoperated Robot
Effect of link and joint flexibility in a teleoperated robot
Researchers: Mahdi Tavakoli, Robert Howe
Related publications: 1, 2, 3, 4
Summary:
In applications such as space and surgical robotics, the use of thin, lightweight manipulators and cable-driven end effectors results in link and joint flexibility of the manipulator. In bilateral teleoperation, however, any flexibility in a link or joint of the robot reduces the effective stiffness of the slave and the transparency of teleoperation.
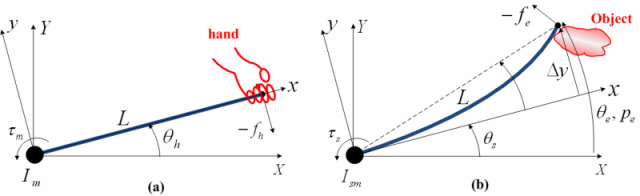
(a) The rigid master; (b) the flexible-link slave.

Models of the operator, master, flexible slave, and environment.
We analyzed master-slave teleoperation transparency under slave robot joint and link flexibility, and evaluated the added benefits of using extra sensors at the end-effector of the flexible robot. Velocity (or position) feedback from the tip of the flexible robot improves free-space position tracking performance, which in the absence of such feedback is hampered by the system's anti-resonance. Also, the flexiblity in the joint or link will be transmitted to the user during a hard contact task unless end-effector velocity feedback is used.

Performance indices of different teleoperation architectures and sensor configurations.