| Telerobotic and
Biorobotic Systems Group University of Alberta Department of Electrical and Computer Engineering |
|
System
identification and robust control (MSc thesis) My
MSc
research dealt with a highly nonlinear dynamical system involving the
interaction of a translational oscillator and a rotational actuator.
The system
is a benchmark for assessing the effectiveness of a given control
method in terms
of stabilizing a translational oscillator (mass-spring) system using a
rotational actuator and models what happens in a dual-spin spacecraft.
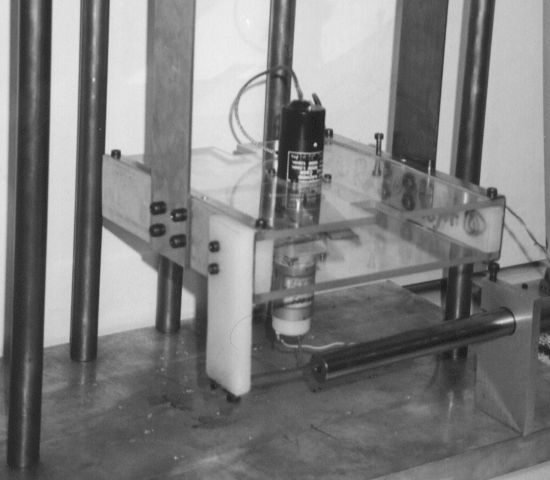
I built
a prototype of the system with two flexible beams used to implement
both the
spring and a suspension (for zero friction such that the mass-spring
system
acts as an undamped oscillator).
Rotational
actuator to control a translational oscillator. I
used
a nonparametric parameter estimation method to model the nonlinear
system as a
perturbed linear system in order to provide the information required
for linear
robust H∞ control design. Results confirmed the effectiveness of the
approach
and that it could effectively condense the whole nonlinearities,
uncertainties,
and disturbances within the system into a favorable perturbation block.
Top:
The frequency responses of the estimated and nominal systems. Bottom:
The
uncertainty profile and the uncertainty weighting function.
Back
to Research |




Home | Research | Publications | People | News