| Telerobotic and
Biorobotic Systems Group University of Alberta Department of Electrical and Computer Engineering |
"Bilateral"
teleoperation
For
haptic teleoperation, user's motion commands are fed forward from the
master to the slave, and environment interaction forces are fed back
from the slave to the master (thus, bilateral control). Using
my master-slave system, I conducted haptic teleoperation experiments
involving a tissue palpation task (probing tissue for estimating its
characteristics). For
different teleoperation controllers (position-error based; direct force
reflection; four-channel), the teleoperator performance was assessed
and compared in terms of objective criteria that evaluate accurate
transmission to the user of
certain task-related information (this
is called "teleoperation transparency"), e.g., force versus deformation
characteristics of a tissue in the case of a palpation task.
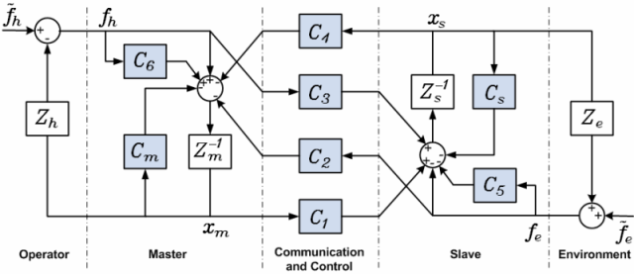
4-channel
bilateral teleoperation system.

Typical
torque–displacement relationships measured at the slave and as
perceived by the user for a silicon-based
phantom
(solid) and a foam object (dotted) as the environment.
This research also involved robot modeling and friction compensation, and hand force estimation using a state observer.
Time
delay compensation in bilateral teleoperation (Please use Internet
Explorer) Discrete-time
control in bilateral teleoperation Discrete-time
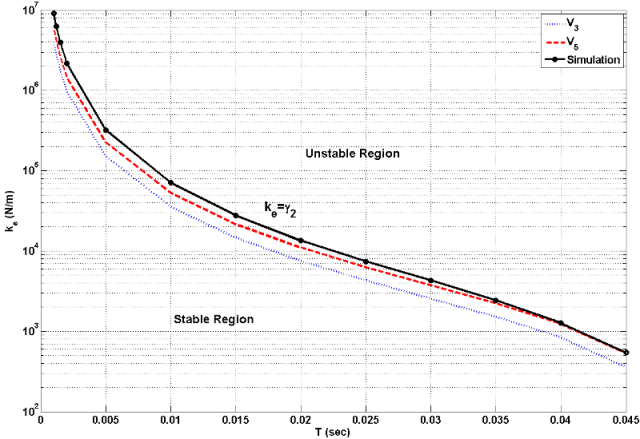
controlled version of the 4-channel teleoperation system. As
the sampling period T is increased, the maximum environment stiffness
k_e with which a slave robot can stably interact is reduced.
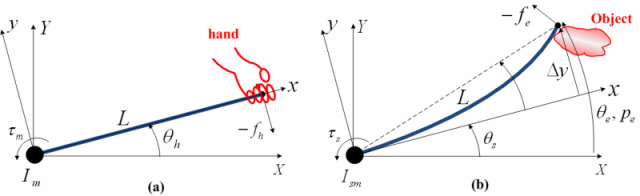
Effect
of link and joint flexibility in a teleoperated robot (a)
The rigid master; (b) the flexible-link slave. Models
of the operator, master, flexible slave, and environment.
I
analyzed master-slave teleoperation transparency under slave robot
joint and link flexibility, and evaluated the added benefits of using
extra sensors at the end-effector of the flexible robot. Velocity (or
position) feedback from the tip of the flexible robot improves
free-space position tracking performance, which in the absence of such
feedback is hampered by the system's anti-resonance. Also, the
flexiblity in the joint or link will be transmitted to the user during
a hard contact task unless end-effector velocity feedback is used. Performance
indices of different teleoperation architectures and sensor
configurations.
I
then focused on time delay compensation in long-distance haptic
teleoperation including telesurgery. The latency introduced by the
communication channel reduces efficiency by requiring the user to slow
down on each movement and can, in the worst case, cause instability in
the teleoperation system. Moreover, time delays significantly change
the “feel” or the perceived mechanical impedance of an object, which is
a measure of teleoperation transparency. In this research, the
scattering approach was extended and new models of a wave-based delay
compensated communication channel were introduced. The research showed
that using slave-side force measurements significantly improve
transparency in comparison to the traditional delay compensation
scheme. The research also bridged the passivity framework to the
4-channel bilateral control architecture, which has far better
transparency characteristics compared to traditional architectures
(position error based and direct force reflection). The proposed
wave-based 4-channel teleoperation control architecture ensures ideal
transparency under time delay, which is a significant advantage over
the previous methods. 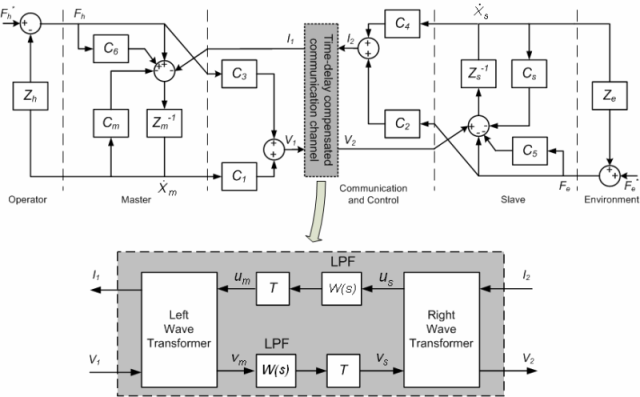
Discretization
of a stabilizing continuous-time bilateral teleoperation controller for
digital implementation may not necessarily lead to stable
teleoperation. I studied the stability of master-slave teleoperation
under discrete-time bilateral control. Stability regions were
determined in the form of conditions involving the sampling period,
control gains including the damping introduced by the controller, and
environment stiffness. Due to the tradeoff between stability and
transparency in bilateral teleoperation, such stability boundaries are
of particular importance when the teleoperation system has good
transparency.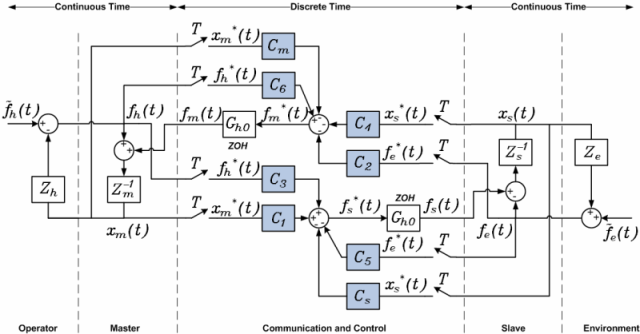
In
applications such as space and surgical robotics, the use of thin,
lightweight manipulators and cable-driven end effectors results in link
and joint flexibility of the manipulator. In bilateral teleoperation,
however, any flexibility in a link or joint of the robot reduces the
effective stiffness of the slave and the transparency of teleoperation.


Home | Research | Publications | People | News