PHANSIM Toolkit For The Sen Sable PHAN To M Haptic Devices
PHANSIM: A Simulink Toolkit For the SenSable PHANToM Haptic Devices
Researchers: Alireza Mohammadi, Mahdi Tavakoli, Ali Jazayeri
Related publications: 1
Summary:
The PHANToM® devices (SensAble Technologies Inc., MA, USA) provide the users in industry and academia with an opportunity for research and education in virtual reality, haptics, robot motion control and teleoperation. Traditionally, one has to develop C/C++ codes using the OpenHaptics® software development kit (SDK) in order to use these devices. The PHANSIM Toolkit is an academic/noncommercial Simulink toolkit for motion control and teleoperation of the PHANToM haptic devices. This toolkit facilitates using the PHANToM haptic devices in Simulink.
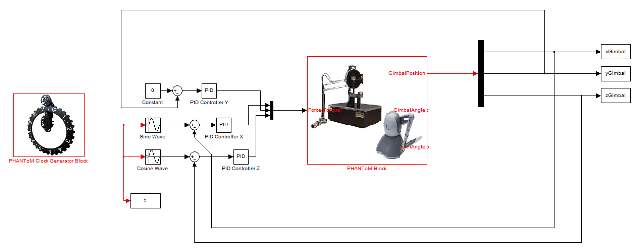
The PHANSIM Toolkit uses C/C++ S-functions along with the OpenHaptics toolkit to make an interface that provides the users with access to the PHANToM torque/force inputs, the Cartesian pose (position and orientation) of the gimbal and the joint angles of the device in the Simulink environment. The toolkit supports the operation of a single haptic device as well as the teleoperation of a master-slave system consisting of two haptic devices. This toolkit enables the users to implement and test their designed controllers on the PHANToM devices in a quick and easy way.
Download PHANSIM (32-bit Windows)
Download PHANSIM (64-bit Windows)
(:youtube F_14OveTS08 scale=1.4:)